Design of PID Controller for First and Second order System
The transfer function is
Enter the values for delay time and time constant obtained from step respose
Enter delay time (L)
Enter time constant (T)
Check Answer
Show Answer
Hint
----------
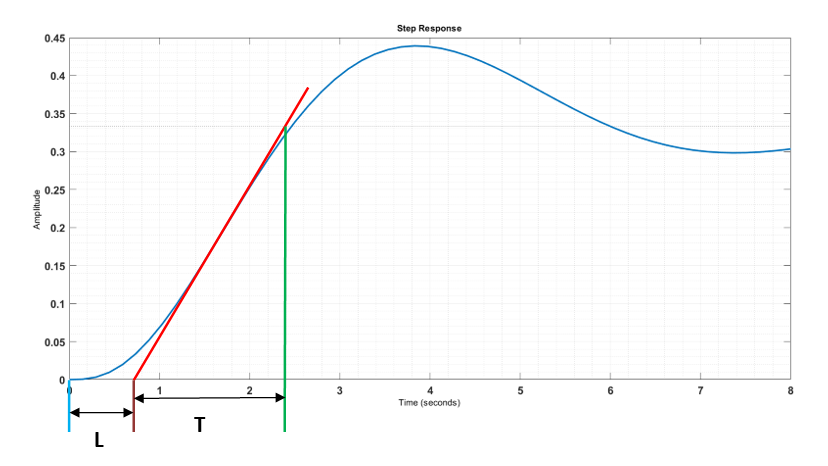
L and T value can be observed from the tangent line drawn on the s shaped curve of the step response
Delay time (L) : 0.6 sec
Time Constant (T) : 1.8 sec
Enter the values for K
p
T
i
T
D
Enter K
p
Values
Enter T
i
Values
Enter T
D
values
Check Answer
Show Answer
Hint
----------
K
p
= 1.2*(T/L), T
i
= 2L and T
D
= 0.5L
K
p
Value : 3.6
T
i
Value : 1.2
T
D
value : 0.3
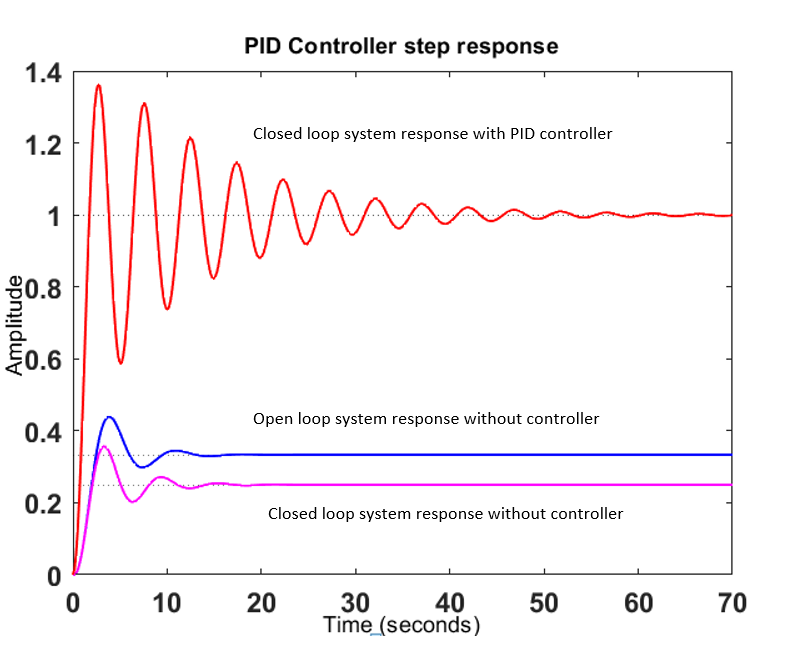
Transfer Function of PID controller
Show the response of PID controller
1. What is the disadvantage of proportional integral controller?
(Choose 1 answer)
System will be less stable
Reduces steady state error
2. What is the Expansion of PID controller?
(Choose 1 answer)
Proportional Integral Derivative
Proportional Internal Derivative
3. The change in output divided by the change in input is known as the
(Choose 1 answer)
Controller gain
Controller error
Submit
Reset